EMESENT จัดแสดงที่ UAV EXPO เชิงพาณิชย์ 2022.

โอเค นี่คือแผนที่โฮเวอร์ของเรา เวอร์ชัน St เอ่อ นี่คือเวอร์ชันล่าสุดที่เรามา
ออกไปกับที่ที่มีลูกซุกลงมาทำมุม 45 องศาแล้วมันคืออะไรกัน
ออกไปกับที่ที่มีลูกซุกลงมาทำมุม 45 องศาแล้วมันคืออะไรกัน

ตาม lidar ดังนั้นจึงมีการโลคัลไลซ์และ แมปไปพร้อม ๆ กัน เมื่อมันหมุนและ

การรวบรวมสภาพแวดล้อม 3 มิติ เรายังสามารถใช้สภาพแวดล้อมนั้นเพื่อนำทางเครื่องบินและ

GPS ปฏิเสธสภาพแวดล้อมดังนั้นเราจึงใหญ่มากในการขุด uh สถานที่ที่เครื่องบินส่วนใหญ่ไม่สามารถบินได้

เพราะพวกเขาไม่มีโซลูชัน GPS เราจึงสามารถใช้ Lidar จริงเพื่อนำทางเครื่องบินได้

ฉันมีตัวอย่างเล็กๆ น้อยๆ ที่จะแสดงให้คุณดู

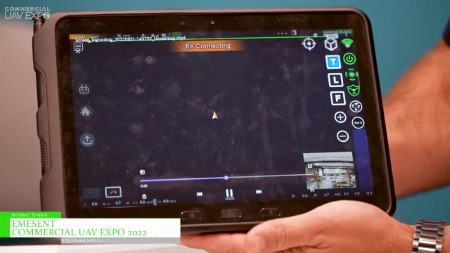
เราจึงอยู่ในโกดังที่มี GPS ถูกปฏิเสธสภาพแวดล้อม เราเริ่มต้นโฮเวอร์

เสื่อเราเริ่มหมุนมันคุยกับแพลตฟอร์ม DJI m300 ที่เรากำลังบินอยู่

เราได้รับโซลูชันของเราและสมัครได้โดยไม่ต้องใช้ GPS จากนั้นเราสามารถออกแล้วเปลี่ยน

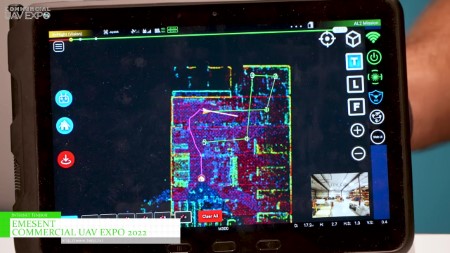
ไปที่คลาวด์ 3D Point แบบสดของเรา และจะเริ่มแสดงพื้นที่ที่กำลังสร้างขึ้น

อย่างที่คุณเห็นนี่เป็นส่วนหนึ่งของคลังสินค้า มันคือ Point Cloud ที่เบาบางมาก

เพียงพอที่จะให้ความคิดแก่คุณว่าคุณกำลังเห็นอะไรอยู่และจะบินไปที่ไหน เพื่อที่เราจะได้เข้ามาจริงๆ
และบอกจุดอ้างอิง และเราสามารถนำทางผ่านคลาวด์จุดนั้นและดูว่าเรากำลังมองที่ใด

เพื่อให้เราสามารถบอกทางได้จนกว่าเครื่องบินจะบินไปยังจุดเหล่านี้โดยอัตโนมัติและ

ในขณะเดียวกันก็จะนำทางไปรอบ ๆ สิ่งกีดขวางเพื่อไปยังจุดเหล่านั้นดังนั้นเราจึง
ให้บางจุดแต่เราวางมันลงที่ไหนก็ได้และเครื่องบินก็จะออกไป
ให้บางจุดแต่เราวางมันลงที่ไหนก็ได้และเครื่องบินก็จะออกไป

และมันจะเข้าสู่โหมดสำรวจจริง ๆ ดังนั้น ฉันจะเร่งไปข้างหน้าเล็กน้อยเมื่อเราวางมันไว้

ดังนั้นเมื่อเราวางมันแล้ว มันยากมากที่จะเห็นในวิดีโอนี้ แต่คุณจะ

เห็นมัดสายไฟห้อยลงมาที่เพดาน ดังนั้น
คุณจะเห็นเครื่องบินนำทางไปรอบ ๆ เพื่อไปยังจุดนั้น
คุณจะเห็นเครื่องบินนำทางไปรอบ ๆ เพื่อไปยังจุดนั้น

เมื่อทำ Waypoint แรกสำเร็จแล้ว ก็จะไปยังจุดถัดไป

และอีกครั้งคือการใช้สภาพแวดล้อมที่สร้างเพื่อหาเส้นทางที่ดีที่สุด

มันจึงวิ่งไปรอบๆ ถึงจุดต่างๆ เหล่านี้เมื่อเข้าใกล้บริเวณที่คุณมองเห็นมากขึ้น

จุดที่ Cloud เริ่มเติมมากขึ้น เพราะมีข้อมูลมากขึ้น
มันจึงนำทางไปหาจุดอ้างอิงถัดไป

และเมื่อไปถึงข้อสุดท้าย ก็จะมีสิ่งกีดขวางเพิ่มขึ้นอีกเล็กน้อยไปยังที่ที่ต้องการ

ย้ายไปรอบ ๆ พวกเขา

มันจึงนำทางกลับไปยังจุดนั้น ณ ขณะนั้น ข้าพเจ้าจึงควบคุมเครื่องบินนำมันกลับคืนมา

ไปยังตำแหน่งที่จะลงจอด เราสามารถ Auto Land ทั้งหมดได้เช่นกัน โดยที่ยังไม่มีการควบคุมแท่งไม้

นำมันกลับลงมา หยุดการสแกนของเรา และจากนั้นสิ่งที่เราต้องทำและหันหลังกลับ

ของแผนที่โฮเวอร์ที่นี่ ได้สิ่งนี้ คุณจะเห็นมัน เราเพิ่งเปิดมันขึ้นมา ก็มี

พอร์ต USB ที่คุณเสียบธัมบ์ไดรฟ์เข้าไป จากนั้นระบบจะเริ่มดาวน์โหลดการสแกนใดๆ ที่คุณมีอยู่

ที่ยังไม่ได้ดาวน์โหลด จึงมีที่เก็บข้อมูล 500 กิกะไบต์อยู่ภายใน ดังนั้นทั้งหมด

การสแกนจะยังคงอยู่จนกว่าคุณจะลบออก แต่เมื่อใดก็ตามที่คุณต้องการสแกนใหม่ คุณเพียงแค่

ติดธัมบ์ไดรฟ์ในการดาวน์โหลดโดยอัตโนมัติ จากนั้นเราไปที่ซอฟต์แวร์ของเราเพื่อประมวลผล

แล้วส่วนที่ดีของซอฟต์แวร์ก็คือ ใช้เวลาในการสแกนประมาณครึ่งหนึ่ง
เพื่อดำเนินการ ดังนั้นหากคุณทำการบิน 10 นาที คุณกำลังดูเกี่ยวกับ
เพื่อดำเนินการ ดังนั้นหากคุณทำการบิน 10 นาที คุณกำลังดูเกี่ยวกับ

15 นาทีในการประมวลผลและมี Cloud เต็มจุดของคุณ เราสามารถส่งออกใน Las Laz e57 uh

OBG ฉันเชื่อว่า obj อืมใช่ ทุกรูปแบบไฟล์ที่จำเป็นในการรวมไฟล์ที่สามทั้งหมด

ซอฟต์แวร์ปาร์ตี้ จากนั้นเราก็แค่ล้างมันออกไปส่งให้ลูกค้า